publications
2023
-
 Autonomous Power Line Inspection with Drones via Perception-Aware MPC (Best Paper Award!)Xing, Jiaxu, Cioffi, Giovanni, Hidalgo-Carrió, Javier, and Scaramuzza, DavideIn IEEE/RSJ International Conference on Intelligent Robots (IROS) 2023
Autonomous Power Line Inspection with Drones via Perception-Aware MPC (Best Paper Award!)Xing, Jiaxu, Cioffi, Giovanni, Hidalgo-Carrió, Javier, and Scaramuzza, DavideIn IEEE/RSJ International Conference on Intelligent Robots (IROS) 2023Drones have the potential to revolutionize power line inspection by increasing productivity, reducing inspection time, improving data quality, and eliminating the risks for human operators. Current state-of-the-art systems for power line inspection have two shortcomings: (i) control is decoupled from perception and needs accurate information about the location of the power lines and masts; (ii) obstacle avoidance is decoupled from the power line tracking, which results in poor tracking in the vicinity of the power masts, and, consequently, in decreased data quality for visual inspection. In this work, we propose a model predictive controller (MPC) that overcomes these limitations by tightly coupling perception and action. Our controller generates commands that maximize the visibility of the power lines while, at the same time, safely avoiding the power masts. For power line detection, we propose a lightweight learning-based detector that is trained only on synthetic data and is able to transfer zero-shot to real-world power line images. We validate our system in simulation and real-world experiments on a mock-up power line infrastructure. We release our code and datasets to the public.
@inproceedings{Xing23iros, author = {Xing, Jiaxu and Cioffi, Giovanni and Hidalgo-Carri{\'{o}}, Javier and Scaramuzza, Davide}, title = {Autonomous Power Line Inspection with Drones via Perception-Aware MPC (<span class="redtext">Best Paper Award!</span>)}, booktitle = {IEEE/RSJ International Conference on Intelligent Robots (IROS)}, thumbnail = {imgs/xing2023iros.jpg}, pdf = {https://rpg.ifi.uzh.ch/docs/IROS23_Xing.pdf}, web = {https://github.com/uzh-rpg/pampc_for_power_line}, video = {https://youtu.be/JA6h-Nv29pU?si=_QPtGbszoTrFumRg}, bibtex_show = {true}, year = {2023} }
2022
-
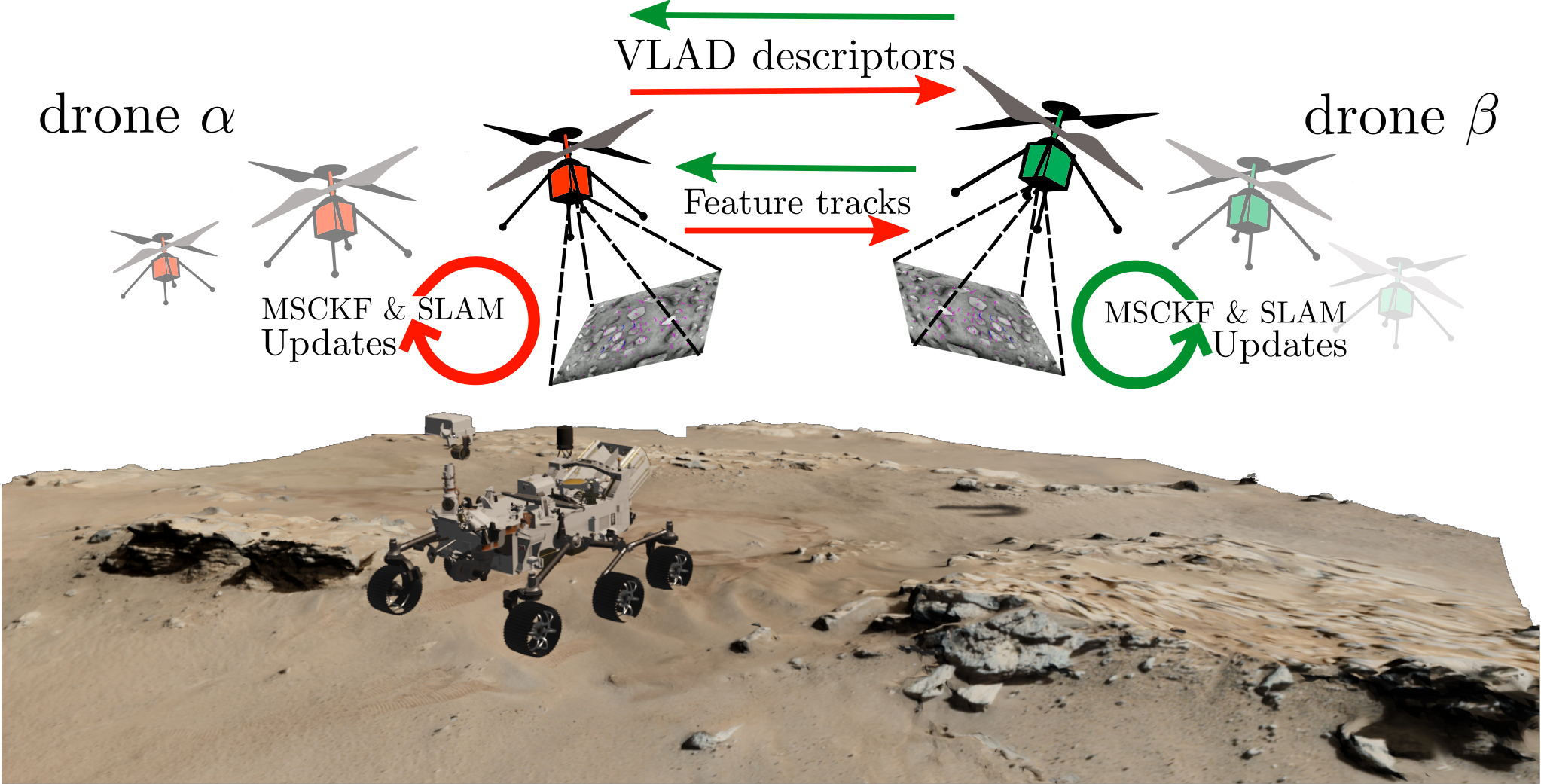 Data-Efficient Collaborative Decentralized Thermal-Inertial OdometryPolizzi, Vincenzo, Hewitt, Robert, Hidalgo-Carrió, Javier, Delaune, Jeff, and Scaramuzza, DavideIEEE Robotics and Automation Letters (RA-L) 2022
Data-Efficient Collaborative Decentralized Thermal-Inertial OdometryPolizzi, Vincenzo, Hewitt, Robert, Hidalgo-Carrió, Javier, Delaune, Jeff, and Scaramuzza, DavideIEEE Robotics and Automation Letters (RA-L) 2022We propose a system solution to achieve data-efficient, decentralized state estimation for a team of flying robots using thermal images and inertial measurements. Each robot can fly independently, and exchange data when possible to refine its state estimate. Our system front-end applies an online photometric calibration to refine the thermal images so as to enhance feature tracking and place recognition. Our system back-end uses a covariance intersection fusion strategy to neglect the cross-correlation between agents so as to lower memory usage and computational cost. The communication pipeline uses Vector of Locally Aggregated Descriptors (VLAD) to construct a request-response policy that requires low bandwidth usage. We test our collaborative method on both synthetic and real-world data. Our results show that the proposed method improves by up to 46% trajectory estimation with respect to an individual-agent approach, while reducing up to 89% the communication exchange. Datasets and code are released to the public, extending the already-public JPL xVIO library.
@article{Polizzi22RAL, author = {Polizzi, Vincenzo and Hewitt, Robert and Hidalgo-Carri{\'{o}}, Javier and Delaune, Jeff and Scaramuzza, Davide}, journal = {IEEE Robotics and Automation Letters (RA-L)}, title = {Data-Efficient Collaborative Decentralized Thermal-Inertial Odometry}, year = {2022}, pages = {1-8}, thumbnail = {imgs/polizzi2022ral.jpg}, pdf = {https://rpg.ifi.uzh.ch/docs/RAL22_Polizzi.pdf}, web = {https://rpg.ifi.uzh.ch/xctio.html}, video = {https://youtu.be/KahAhSxC9_8?si=u6lVQjgg-ykOEd-G}, bibtex_show = {true}, doi = {10.1109/LRA.2022.3194675} } -
 Event-aided Direct Sparse odometry (Oral Presentation)Hidalgo-Carrió, Javier, Gallego, Guillermo, and Scaramuzza, DavideIn Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2022
Event-aided Direct Sparse odometry (Oral Presentation)Hidalgo-Carrió, Javier, Gallego, Guillermo, and Scaramuzza, DavideIn Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2022We introduce EDS, a direct monocular visual odometry using events and frames. Our algorithm leverages the event generation model to track the camera motion in the blind time between frames. The method formulates a direct probabilistic approach of observed brightness increments. Per-pixel brightness increments are predicted using a sparse number of selected 3D points and are compared to the events via the brightness increment error to estimate camera motion. The method recovers a semi-dense 3D map using photometric bundle adjustment. EDS is the first method to perform 6-DOF VO using events and frames with a direct approach. By design it overcomes the problem of changing appearance in indirect methods. We also show that, for a target error performance, EDS can work at lower frame rates than state-of-the-art frame-based VO solutions. This opens the door to low-power motion-tracking applications where frames are sparingly triggered "on demand" and our method tracks the motion in between. We release code and datasets to the public.
@inproceedings{Hidalgo2022cvpr, author = {Hidalgo-Carri{\'{o}}, Javier and Gallego, Guillermo and Scaramuzza, Davide}, title = {Event-aided Direct Sparse odometry (<span class="redtext">Oral Presentation</span>)}, booktitle = {Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, thumbnail = {imgs/hidalgo2022cvpr.png}, pdf = {http://rpg.ifi.uzh.ch/docs/CVPR22_Hidalgo.pdf}, web = {https://rpg.ifi.uzh.ch/eds}, video = {https://youtu.be/Y97Sg4YTRh0}, bibtex_show = {true}, year = {2022} }
2021
-
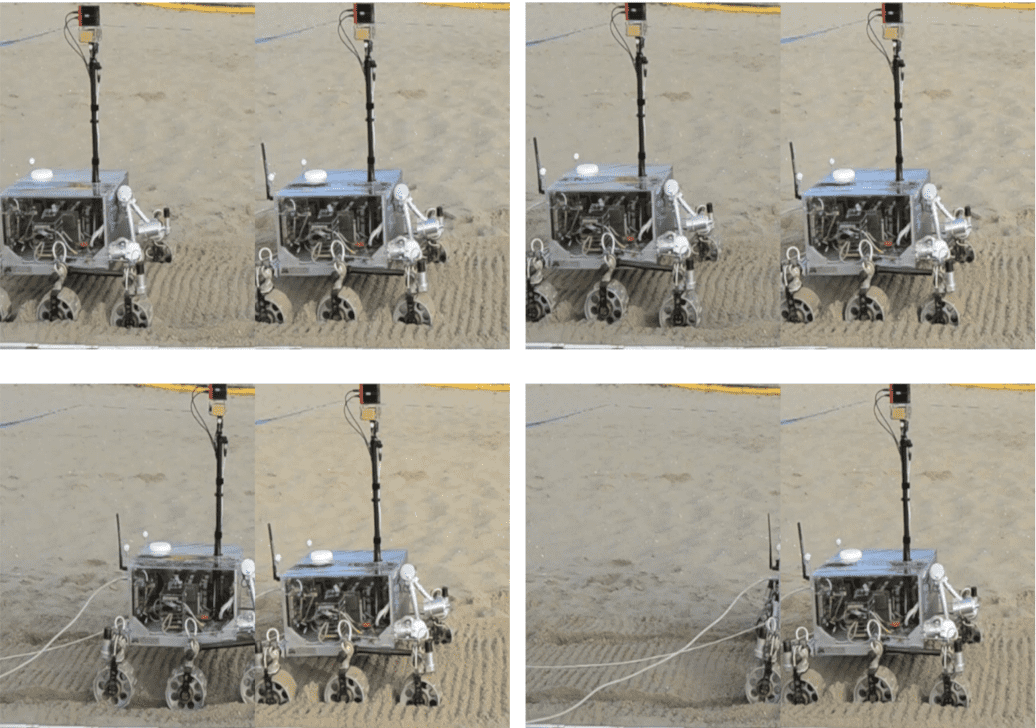
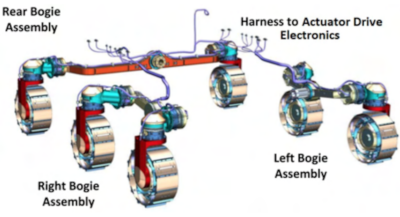 Concept, Development and Testing of Mars Rover Prototypes for ESA Planetary ExplorationAzkarate, Martín, Gerbes, Levin, Wiese, Tim, Zwick, Martin, Pagnamenta, Marco, Hidalgo-Carrió, Javier, Poulakis, Pantelis, and Pérez-del-Pulgar, Carlos J.IEEE Robotics and Automation Magazine (RAM) 2021
Concept, Development and Testing of Mars Rover Prototypes for ESA Planetary ExplorationAzkarate, Martín, Gerbes, Levin, Wiese, Tim, Zwick, Martin, Pagnamenta, Marco, Hidalgo-Carrió, Javier, Poulakis, Pantelis, and Pérez-del-Pulgar, Carlos J.IEEE Robotics and Automation Magazine (RAM) 2021This paper presents the system architecture and design of two planetary rover laboratory prototypes developedat the European Space Agency (ESA). These research platforms have been developed to provide early prototypes for validation of designs and serve ESA’s Automation & Robotics Lab infrastructure as testbeds for continuous research and testing. Both rovers have been built considering the constraints of Space Systems with the sufficient level of representativeness to allow rapid prototyping. They avoid strictly space-qualified components and designs that present a major cost burden and frequently lack the flexibility or modularity that the lab environment requires for its investigations. This design approach is followed for all the mechanical, electrical, and software aspects of the system. In thispaper, two ExoMars mission-representative rovers, the ExoMars Testing Rover (ExoTeR) and the Martian Rover Testbed for Autonomy (MaRTA), are thoroughly described. The lessons learntand experience gained while running several research activitiesand test campaigns are also presented. Finally, the paper aims toprovide some insight on how to reduce the gap between lab R&D and flight implementation by anticipating system constraints when building and testing these platforms.
@article{Azkarate2021ram, author = {Azkarate, Mart{\'{i}}n and Gerbes, Levin and Wiese, Tim and Zwick, Martin and Pagnamenta, Marco and Hidalgo-Carri{\'{o}}, Javier and Poulakis, Pantelis and P{\'{e}}rez-del-Pulgar, Carlos J.}, title = {Concept, Development and Testing of Mars Rover Prototypes for ESA Planetary Exploration}, journal = {IEEE Robotics and Automation Magazine (RAM)}, thumbnail = {imgs/azkarate2021ram.png}, pdf = {https://riuma.uma.es/xmlui/bitstream/handle/10630/22480/IEEE_RAM_ExoTeR_MaRTA-compressed.pdf}, bibtex_show = {true}, year = {2021} } -
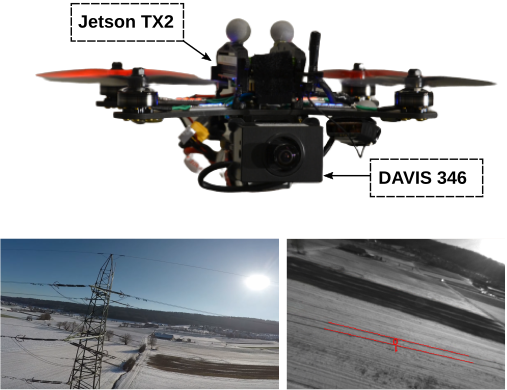 Powerline Tracking with Event CamerasDietsche, Alexander, Cioffi, Giovanni, Hidalgo-Carrió, Javier, and Scaramuzza, DavideIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2021
Powerline Tracking with Event CamerasDietsche, Alexander, Cioffi, Giovanni, Hidalgo-Carrió, Javier, and Scaramuzza, DavideIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2021Autonomous inspection of powerlines with quadrotors is challenging. Flights require persistent perception to keep a close look at the lines. We propose a method that uses event cameras to robustly track powerlines. Event cameras are inherently robust to motion blur, have low latency, and high dynamic range. Such properties are advantageous for autonomous inspection of powerlines with drones, where fast motions and challenging illumination conditions are ordinary. Our method identifies lines in the stream of events by detecting planes in the spatio-temporal signal, and tracks them through time. The implementation runs onboard and is capable of detecting multiple distinct lines in real time with rates of up to 320 thousand events per second. The performance is evaluated in real-world flights along a powerline. The tracker is able to persistently track the powerlines, with a mean lifetime of the line 10x longer than existing approaches.
@article{Dietsche2021iros, author = {Dietsche, Alexander and Cioffi, Giovanni and and Hidalgo-Carri{\'{o}}, Javier and Scaramuzza, Davide}, title = {Powerline Tracking with Event Cameras}, journal = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, thumbnail = {imgs/dietsche2021iros.png}, pdf = {http://rpg.ifi.uzh.ch/docs/IROS21_Dietsche.pdf}, video = {https://youtu.be/KnBJqed5qDI}, web = {https://github.com/uzh-rpg/line_tracking_with_event_cameras}, bibtex_show = {true}, year = {2021} } -
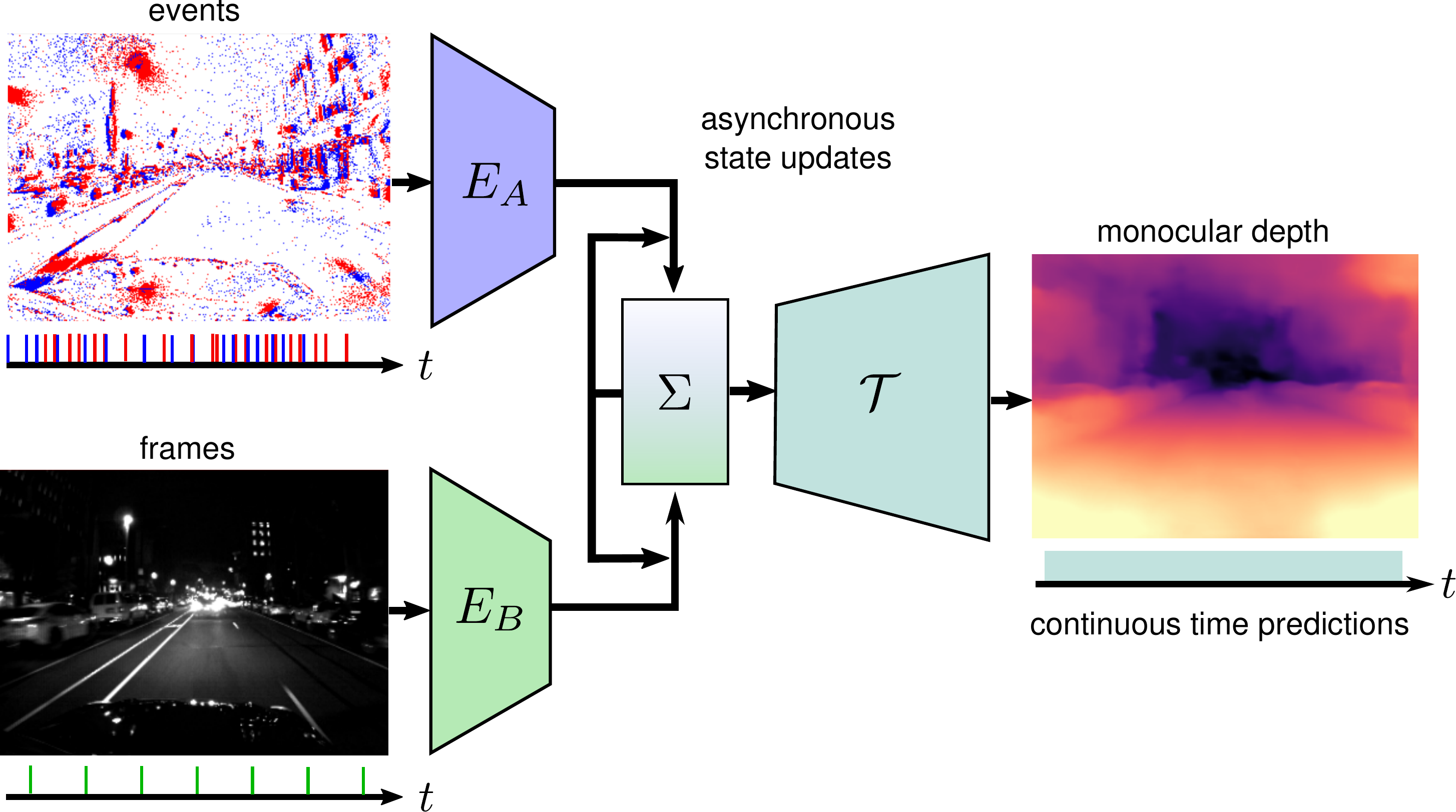 Combining Events and Frames using Recurrent Asynchronous Multimodal Networks for Monocular Depth PredictionGehrig, Daniel, Rüegg, Michelle, Gehrig, Mathias, Hidalgo-Carrió, Javier, and Scaramuzza, DavideIEEE Robotic and Automation Letters (RA-L) 2021
Combining Events and Frames using Recurrent Asynchronous Multimodal Networks for Monocular Depth PredictionGehrig, Daniel, Rüegg, Michelle, Gehrig, Mathias, Hidalgo-Carrió, Javier, and Scaramuzza, DavideIEEE Robotic and Automation Letters (RA-L) 2021Event cameras are novel vision sensors that report per-pixel brightness changes as a stream of asynchronous “events”. They offer significant advantages compared to standard cameras due to their high temporal resolution, high dynamic range and lack of motion blur. However, events only measurethe varying component of the visual signal, which limits their ability to encode scene context. By contrast, standard cameras measure absolute intensity frames, which capture a much richer representation of the scene. Both sensors are thus complementary.However, due to the asynchronous nature of events, combining them with synchronous images remains challenging, especially for learning-based methods. This is because traditional recurrent neural networks (RNNs) are not designed for asynchronousand irregular data from additional sensors. To address this challenge, we introduce Recurrent Asynchronous Multimodal(RAM) networks, which generalize traditional RNNs to handle asynchronous and irregular data from multiple sensors. Inspired by traditional RNNs, RAM networks maintain a hidden state that is updated asynchronously and can be queried at any time to generate a prediction. We apply this novel architecture to monocular depth estimation with events and frames where weshow an improvement over state-of-the-art methods by up to 30% in terms of mean absolute depth error. To enable further research on multimodal learning with events, we release Event Scape, a newdataset with events, intensity frames, semantic labels, and depthmaps recorded in the CARLA simulator.
@article{Gehrig2021ral, author = {Gehrig, Daniel and Rüegg, Michelle and Gehrig, Mathias and Hidalgo-Carri{\'{o}}, Javier and Scaramuzza, Davide}, title = {Combining Events and Frames using Recurrent Asynchronous Multimodal Networks for Monocular Depth Prediction}, journal = {{IEEE} Robotic and Automation Letters (RA-L)}, thumbnail = {imgs/gehrig2021ral.png}, video = {https://youtu.be/7Hbi-YFCuRY}, pdf = {http://rpg.ifi.uzh.ch/docs/RAL21_Gehrig.pdf}, web = {http://rpg.ifi.uzh.ch/RAMNet.web}, bibtex_show = {true}, year = {2021} }
2020
-
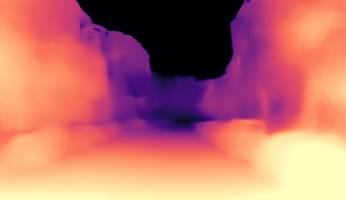 Learning Monocular Dense Depth from EventsHidalgo-Carrió, Javier, Gehrig, Daniel, and Scaramuzza, DavideIEEE International Conference on 3D Vision (3DV) 2020
Learning Monocular Dense Depth from EventsHidalgo-Carrió, Javier, Gehrig, Daniel, and Scaramuzza, DavideIEEE International Conference on 3D Vision (3DV) 2020Event cameras are novel sensors that output brightness changes in the form of a stream of asynchronous ”events” instead of intensity frames. Compared to conventional image sensors, they offer significant advantages:high temporal resolution, high dynamic range, no motionblur, and much lower bandwidth. Recently, learning-based approaches have been applied to event-based data, thus unlocking their potential and making significant progress in avariety of tasks, such as monocular depth prediction. Mostexisting approaches use standard feed-forward architectures to generate network predictions, which do not leverage the temporal consistency presents in the event stream.We propose a recurrent architecture to solve this task andshow significant improvement over standard feed-forwardmethods. In particular, our method generates dense depth predictions using a monocular setup, which has not beenshown previously. We pretrain our model using a newdataset containing events and depth maps recorded in the CARLA simulator. We test our method on the Multi Vehicle Stereo Event Camera Dataset (MVSEC). Quantitative experiments show up to 50% improvement in average deptherror with respect to previous event-based methods
@article{Hidalgo2020threedv, author = {Hidalgo-Carri{\'{o}}, Javier and Gehrig, Daniel and Scaramuzza, Davide}, title = {Learning Monocular Dense Depth from Events}, journal = {{IEEE} International Conference on 3D Vision (3DV)}, thumbnail = {imgs/hidalgo2020threedv.png}, web = {http://rpg.ifi.uzh.ch/e2depth/}, pdf = {http://rpg.ifi.uzh.ch/docs/3DV20_Hidalgo.pdf}, video = {https://youtu.be/MJ6klYG1rQc}, bibtex_show = {true}, year = {2020} } -
 Video to Events: Recycling Video Datasets for Event CamerasGehrig, Daniel, Gehrig, Mathias, Hidalgo-Carrió, Javier, and Scaramuzza, DavideIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2020
Video to Events: Recycling Video Datasets for Event CamerasGehrig, Daniel, Gehrig, Mathias, Hidalgo-Carrió, Javier, and Scaramuzza, DavideIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2020vent cameras are novel sensors that output brightnesschanges in the form of a stream of asynchronous “events”instead of intensity frames. They offer significant advan-tages with respect to conventional cameras: high dynamicrange (HDR), high temporal resolution, and no motion n blur.Recently, novel learning approaches operating on eventdata have achieved impressive results. Yet, these methodsrequire a large amount of event data for training, which ishardly available due the novelty of event sensors in com-puter vision research. In this paper, we present a methodthat addresses these needs by converting any existing videodataset recorded with conventional cameras tosyntheticevent data. This unlocks the use of a virtually unlimitednumber of existing video datasets for training networks de-signed for real event data. We evaluate our method on tworelevant vision tasks, i.e., object recognition and semanticsegmentation, and show that models trained on syntheticevents have several benefits: (i) they generalize well to realevent data, even in scenarios where standard-camera im-ages are blurry or overexposed, by inheriting the outstand-ing properties of event cameras; (ii) they can be used forfine-tuning on real data to improve over state-of-the-art forboth classification and semantic segmentation.
@inproceedings{Gehrig2020cvpr, author = {Gehrig, Daniel and Gehrig, Mathias and Hidalgo-Carri{\'{o}}, Javier and Scaramuzza, Davide}, title = {Video to Events: Recycling Video Datasets for Event Cameras}, booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, month = jun, thumbnail = {imgs/gehrig2020cvpr.jpg}, web = {https://github.com/uzh-rpg/rpg_vid2e}, pdf = {http://rpg.ifi.uzh.ch/docs/CVPR20_Gehrig.pdf}, video = {https://youtu.be/uX6XknBGg0w}, bibtex_show = {true}, year = {2020} }
2018
-
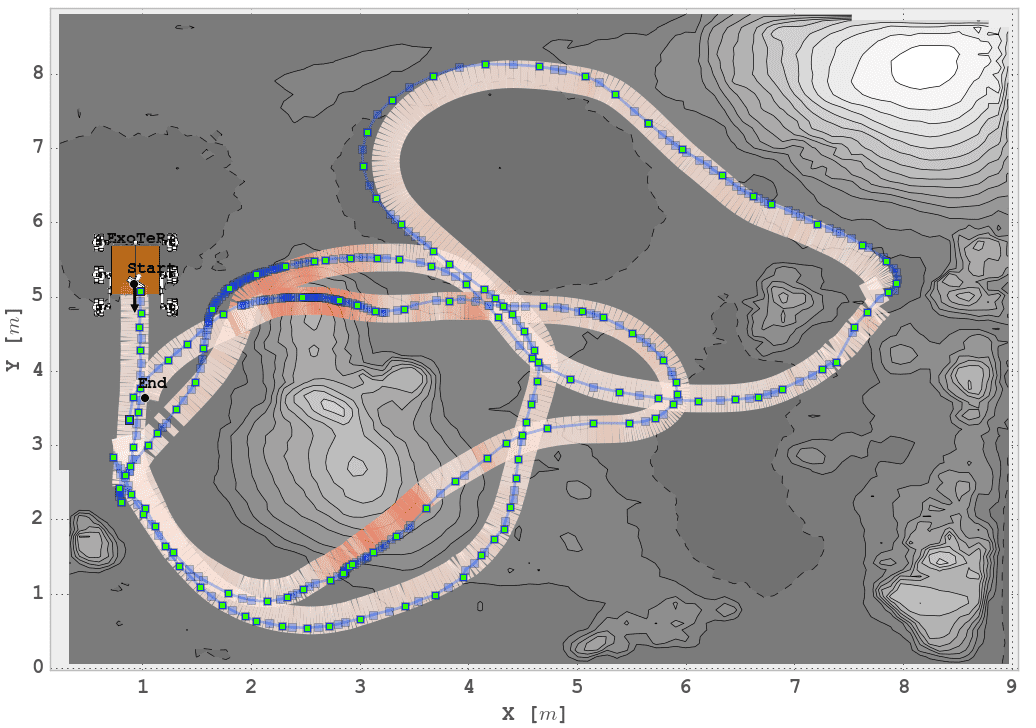
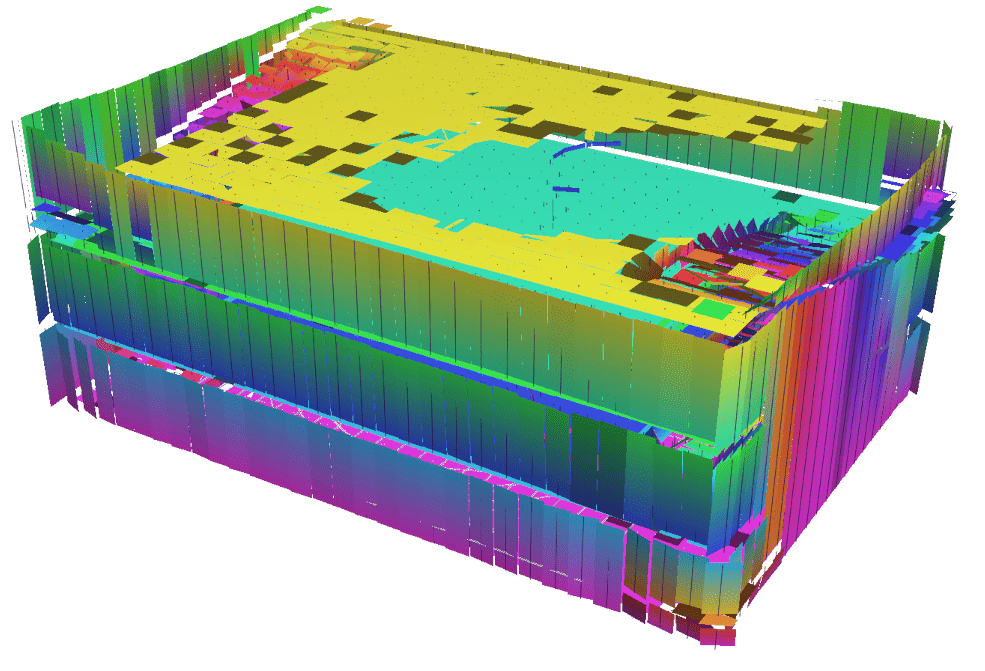
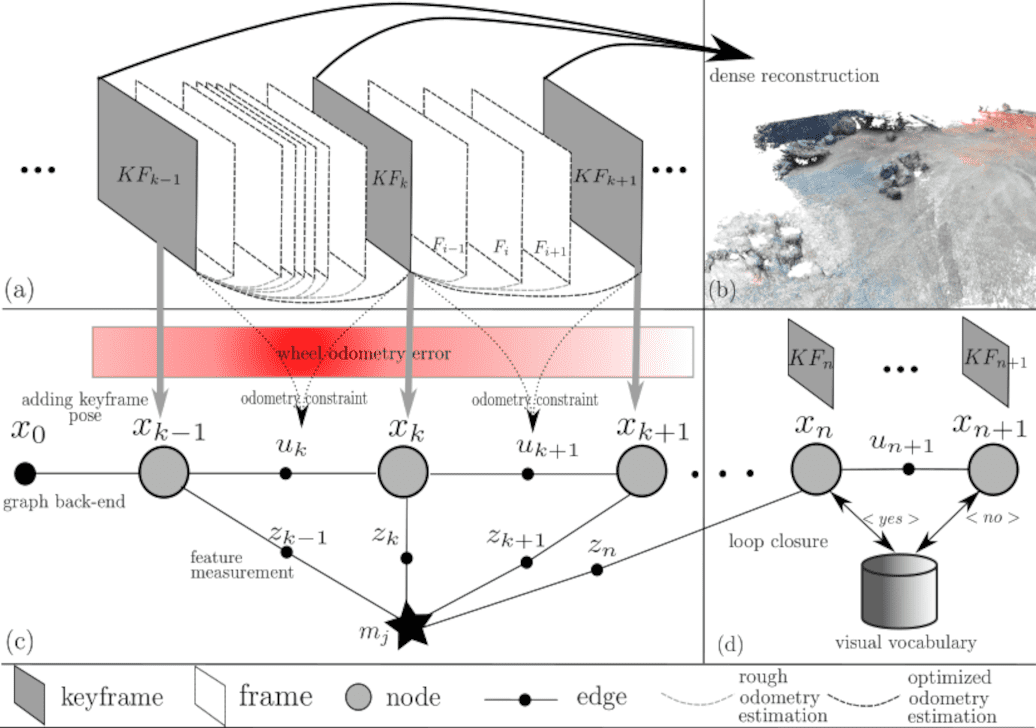 Adaptive localization and mapping with application to planetary roversHidalgo-Carrió, Javier, Poulakis, Pantelis, and Kirchner, FrankJournal of Field Robotics 2018
Adaptive localization and mapping with application to planetary roversHidalgo-Carrió, Javier, Poulakis, Pantelis, and Kirchner, FrankJournal of Field Robotics 2018Future exploration rovers will be equipped with substantial onboard autonomy. SLAM is a fundamental part and has a close connection with robot perception, planning, and control. The community has made great progress in the past decade by enabling real-world solutions and is addressing important challenges in high-level scalability, resources awareness, and domain adaptation. A novel adaptive SLAM system is proposed to accomplish rover navigation and computational demands. It starts from a three-dimensional odometry dead reckoning solution and builds up to a full graph optimization that takes into account rover traction performance. A complete kinematics of the rover locomotion system improves the wheel odometry solution. In addition, an odometry error model is inferred using Gaussian processes (GPs) to predict nonsystematic errors induced by poor traction of the rover with the terrain. The nonparametric GP regression serves to adapt the localization and mapping to the current navigation demands (domain adaptation). The method brings scalability and adaptiveness to modern SLAM. Therefore, an adaptive strategy develops to adjust the image frame rate (active perception) and to influence the optimization backend by including high informative keyframes in the graph (adaptive information gain). The work is experimentally verified on a representative planetary rover under a realistic field test scenario. The results show a modern SLAM systems that adapt to the predicted error. The system maintains accuracy with less number of nodes taking the most benefit of both wheel and visual methods in a consistent graph-based smoothing approach.
@article{Hidalgo2018jfr, author = {Hidalgo-Carri{\'{o}}, Javier and Poulakis, Pantelis and Kirchner, Frank}, thumbnail = {imgs/hidalgo2018jfr.png}, doi = {10.1002/rob.21790}, issn = {15564959}, journal = {Journal of Field Robotics}, keywords = {mapping,planetary robotics,position estimation}, mendeley-groups = {localization/mapping}, month = jun, publisher = {Wiley-Blackwell}, title = {{Adaptive localization and mapping with application to planetary rovers}}, web = {http://doi.wiley.com/10.1002/rob.21790}, pdf = {http://rpg.ifi.uzh.ch/docs/JFR18_Hidalgo.pdf}, bibtex_show = {true}, year = {2018} }
2017
-
 Gaussian Process Estimation of Odometry Errors for Localization and MappingHidalgo-Carrió, Javier, Hennes, Daniel, Schwendner, Jakob, and Kirchner, FrankIn IEEE International Conference on Robotics and Automation (ICRA) 2017
Gaussian Process Estimation of Odometry Errors for Localization and MappingHidalgo-Carrió, Javier, Hennes, Daniel, Schwendner, Jakob, and Kirchner, FrankIn IEEE International Conference on Robotics and Automation (ICRA) 2017Since early in robotics the performance of odometry techniques has been of constant research for mobile robots. This is due to its direct influence on localization. The pose error grows unbounded in dead-reckoning systems and its uncertainty has negative impacts in localization and mapping (i.e. SLAM). The dead-reckoning performance in terms of residuals, i.e. the difference between the expected and the real pose state, is related to the statistical error or uncertainty in probabilistic motion models. A novel approach to model odometry errors using Gaussian processes (GPs) is presented. The methodology trains a GP on the residual between the non-linear parametric motion model and the ground truth training data. The result is a GP over odometry residuals which provides an expected value and its uncertainty in order to enhance the belief with respect to the parametric model. The localization and mapping benefits from a comprehensive GP-odometry residuals model. The approach is applied to a planetary rover in an unstructured environment. We show that our approach enhances visual SLAM by efficiently computing image frames and effectively distributing keyframes.
@inproceedings{Hidalgo2017icra, address = {Singapore}, author = {Hidalgo-Carri{\'{o}}, Javier and Hennes, Daniel and Schwendner, Jakob and Kirchner, Frank}, booktitle = {IEEE International Conference on Robotics and Automation (ICRA)}, doi = {978-1-5090-4632-4/17/}, keywords = {machine learning,slam,space robotics}, thumbnail = {imgs/hidalgo2017icra.png}, video = {https://youtu.be/amHGMx6E_eY}, pdf = {http://rpg.ifi.uzh.ch/docs/ICRA17_Hidalgo.pdf}, publisher = {IEEE}, title = {{Gaussian Process Estimation of Odometry Errors for Localization and Mapping}}, bibtex_show = {true}, year = {2017} }
2016
-
 On the Design of Attitude-Heading Reference Systems Using the Allan Variance.Hidalgo-Carrió, Javier, Arnold, Sascha, and Poulakis, PantelisIEEE transactions on ultrasonics, ferroelectrics, and frequency control 2016
On the Design of Attitude-Heading Reference Systems Using the Allan Variance.Hidalgo-Carrió, Javier, Arnold, Sascha, and Poulakis, PantelisIEEE transactions on ultrasonics, ferroelectrics, and frequency control 2016The Allan variance is a method to characterize stochastic random processes. The technique was originally developed to characterize the stability of atomic clocks and has also been successfully applied to the characterization of inertial sensors. Inertial navigation systems (INS) can provide accurate results in a short time, which tend to rapidly degrade in longer time intervals. During the last decade, the performance of inertial sensors has significantly improved, particularly in terms of signal stability, mechanical robustness, and power consumption. The mass and volume of inertial sensors have also been significantly reduced, offering system-level design and accommodation advantages. This paper presents a complete methodology for the characterization and modeling of inertial sensors using the Allan variance, with direct application to navigation systems. Although the concept of sensor fusion is relatively straightforward, accurate characterization and sensor-information filtering is not a trivial task, yet they are essential for good performance. A complete and reproducible methodology utilizing the Allan variance, including all the intermediate steps, is described. An end-to-end (E2E) process for sensor-error characterization and modeling up to the final integration in the sensor-fusion scheme is explained in detail. The strength of this approach is demonstrated with representative tests on novel, high-grade inertial sensors. Experimental navigation results are presented from two distinct robotic applications: a planetary exploration rover prototype and an autonomous underwater vehicle (AUV).
@article{Hidalgo2016trans, author = {Hidalgo-Carri{\'{o}}, Javier and Arnold, Sascha and Poulakis, Pantelis}, doi = {10.1109/TUFFC.2016.2519268}, issn = {1525-8955}, journal = {IEEE transactions on ultrasonics, ferroelectrics, and frequency control}, keywords = {AUV,Allan variance,E2E process,INS,Navigation,Robot sensing systems,Sensor fusion,Sensor phenomena and characterization,Stochastic processes,attitude-heading reference system design,autonomous underwater vehicle,autonomous underwater vehicles,end-to-end process,error modeling,error modelling,filtering theory,high-grade inertial sensors,inertial navigation,inertial navigation systems,inertial navigation systems (INS),inertial sensor mass reduction,inertial sensor performance improvement,inertial sensor volume reduction,inertial systems,mechanical robustness,path planning,planetary exploration rover prototype,planetary rovers,power consumption,robotic applications,sensor characterization,sensor fusion,sensor-error characterization,sensor-information filtering,signal stability,stochastic random processes,system-level design}, month = apr, number = {4}, pages = {656--65}, pmid = {26800535}, shorttitle = {IEEE Transactions on Ultrasonics, Ferroelectrics,}, title = {{On the Design of Attitude-Heading Reference Systems Using the Allan Variance.}}, volume = {63}, thumbnail = {imgs/hidalgo2016trans.jpg}, web = {https://ieeexplore.ieee.org/document/7386705}, pdf = {http://rpg.ifi.uzh.ch/docs/UFFC16_Hidalgo.pdf}, bibtex_show = {true}, year = {2016} } -
 EnviRe - Environment Representation for Long-term AutonomyHidalgo-Carrió, Javier, Arnold, Sascha, Boeckmann, Arne, Born, Anna, Dominguez, Raul, Hennes, Daniel, Hertzberg, Christoph, Machowinski, Janosch, Schwendner, Jakob, Yoo, Yong-Ho, and Kirchner, FrankIn AI for Long-term Autonomy workshop on the International Conference on Robotics and Automation (ICRA) 2016
EnviRe - Environment Representation for Long-term AutonomyHidalgo-Carrió, Javier, Arnold, Sascha, Boeckmann, Arne, Born, Anna, Dominguez, Raul, Hennes, Daniel, Hertzberg, Christoph, Machowinski, Janosch, Schwendner, Jakob, Yoo, Yong-Ho, and Kirchner, FrankIn AI for Long-term Autonomy workshop on the International Conference on Robotics and Automation (ICRA) 2016Data representation is a key element for robots to navigate and perform autonomous tasks in unstructured environments. This is due to autonomous tasks which call for an environment model suitable for systems that might operate during long periods of time. This work presents EnviRe, an environment representation model that facilitates long-term tasks for autonomous systems in real-world scenarios. The EnviRe model is a strongly connected directed graph which allows sensor data acquisition, data processing, reasoning and operations among different data formats in order to accomplish the navigation and planning demands.
@inproceedings{Hidalgo2016icra, address = {Stockholm}, author = {Hidalgo-Carri{\'{o}}, Javier and Arnold, Sascha and Boeckmann, Arne and Born, Anna and Dominguez, Raul and Hennes, Daniel and Hertzberg, Christoph and Machowinski, Janosch and Schwendner, Jakob and Yoo, Yong-Ho and Kirchner, Frank}, booktitle = {AI for Long-term Autonomy workshop on the International Conference on Robotics and Automation (ICRA)}, editor = {{IEEE Robotics and Automation Society}}, keywords = {autonomy,framework,front-end,localization,navigation,planning,simulation,slam}, pages = {1 -- 5}, thumbnail = {imgs/hidalgo2016icra.png}, web = {https://github.com/envire}, pdf = {https://www.dfki.de/fileadmin/user_upload/import/8365_Hidalgo-Carrio_et_al._-_2016_-_EnviRe_-_Environment_Representation_for_Long_Term_Autonomy.pdf}, title = {{EnviRe - Environment Representation for Long-term Autonomy}}, bibtex_show = {true}, year = {2016} }
2015
-
 First Experimental Investigations on Wheel-Walking for Improving Triple-Bogie Rover Locomotion PerformancesAzkarate, Martin, Zwick, Martin, Hidalgo-Carrió, Javier, Nelen, Robin, Wiese, Tim, Poulakis, Pantelis, Joudrier, Luc, and Visentin, GianfrancoIn Advanced Space Technologies for Robotics and Automation 2015
First Experimental Investigations on Wheel-Walking for Improving Triple-Bogie Rover Locomotion PerformancesAzkarate, Martin, Zwick, Martin, Hidalgo-Carrió, Javier, Nelen, Robin, Wiese, Tim, Poulakis, Pantelis, Joudrier, Luc, and Visentin, GianfrancoIn Advanced Space Technologies for Robotics and Automation 2015Deployment actuators of a triple-bogie rover locomotion platform can be used to perform Wheel-Walking (WW) manoeuvres. How WW could affect the traversing capabilities of rovers is a recurrent debate in the planetary robotics community. The Automation and Robotics Section of ESTEC has initiated a long term project to evaluate the performance of WW manoeuvres in different scenarios. This paper presents the first experimental results on this project, obtained during the test campaign run on November 2014 at the Planetary Robotics Lab (PRL) of ESTEC, and shows the performance analysis made when comparing WW with standard rolling. The PRL rover prototype ExoTeR was used to test three different scenarios: entrapment in loose soil, up-slope traverse and lander egressing. WW locomotion showed increased capabilities in all scenarios and proved its relevance and advantages for planetary exploration missions.
@inproceedings{Azkarate2015astra, author = {Azkarate, Martin and Zwick, Martin and Hidalgo-Carri{\'{o}}, Javier and Nelen, Robin and Wiese, Tim and Poulakis, Pantelis and Joudrier, Luc and Visentin, Gianfranco}, booktitle = {Advanced Space Technologies for Robotics and Automation}, keywords = {exomars,kinematics,locomotion,wheel-walking}, title = {{First Experimental Investigations on Wheel-Walking for Improving Triple-Bogie Rover Locomotion Performances}}, thumbnail = {imgs/azkarate2015astra.png}, pdf = {http://robotics.estec.esa.int/ASTRA/Astra2015/Papers/Session%202A/95665_Azkarate.pdf}, video = {https://youtu.be/qkOKzFq1SpY}, bibtex_show = {true}, year = {2015} } -
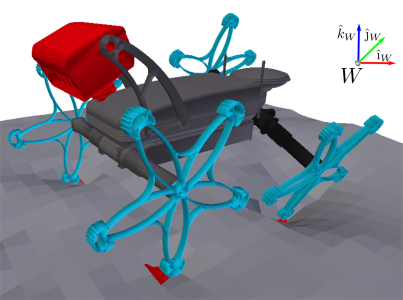
 Soil Contact Model for Environment Representation and Simulation of Legged Robot on Planetary SurfaceYoo, Yong-Ho, Schwendner, Jakob, Hidalgo-Carrió, Javier, and Kirchner, FrankIn ISTVS 13th European Conference 2015
Soil Contact Model for Environment Representation and Simulation of Legged Robot on Planetary SurfaceYoo, Yong-Ho, Schwendner, Jakob, Hidalgo-Carrió, Javier, and Kirchner, FrankIn ISTVS 13th European Conference 2015This paper introduces a new soil contact model called plastic terramechanics particle (PTP). The purpose of the model is the simulation of legged robots on planetary surfaces. An analysis of walking and contact behaviors of a legged robot on the soil surface has been performed. From the analysis, fundamental contact behaviors have been selected and realized in the PTP soil contact model where complex foot-soil contact dynamics is modeled by using volume-cells and particles. This approach considerably reduces the modeling complexity and provides real-time processing capabilities. The work also shows an integration of the soil contact model into the environment representation used for navigation, operation and simulation tasks of legged robots. Typical environment representations for robotic applications uses 3D maps based on the multi-level laser scan data acquired by exteroceptive sensors mounted on the robot. The manuscript introduces the environment representation as a bridge between real and simulated world shared among robotic subsystems.
@inproceedings{Yoo2015istvs, author = {Yoo, Yong-Ho and Schwendner, Jakob and Hidalgo-Carri{\'{o}}, Javier and Kirchner, Frank}, booktitle = {ISTVS 13th European Conference}, title = {{Soil Contact Model for Environment Representation and Simulation of Legged Robot on Planetary Surface}}, thumbnail = {imgs/yoo2015istvs.png}, web = {https://www.istvs.org}, bibtex_show = {true}, year = {2015} } -
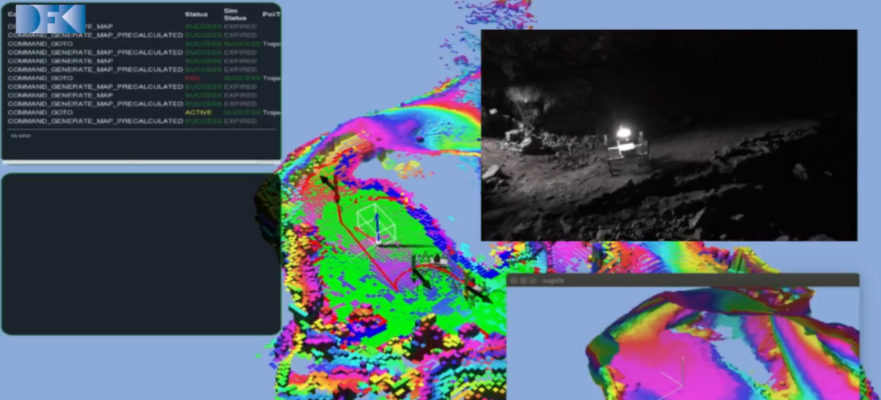
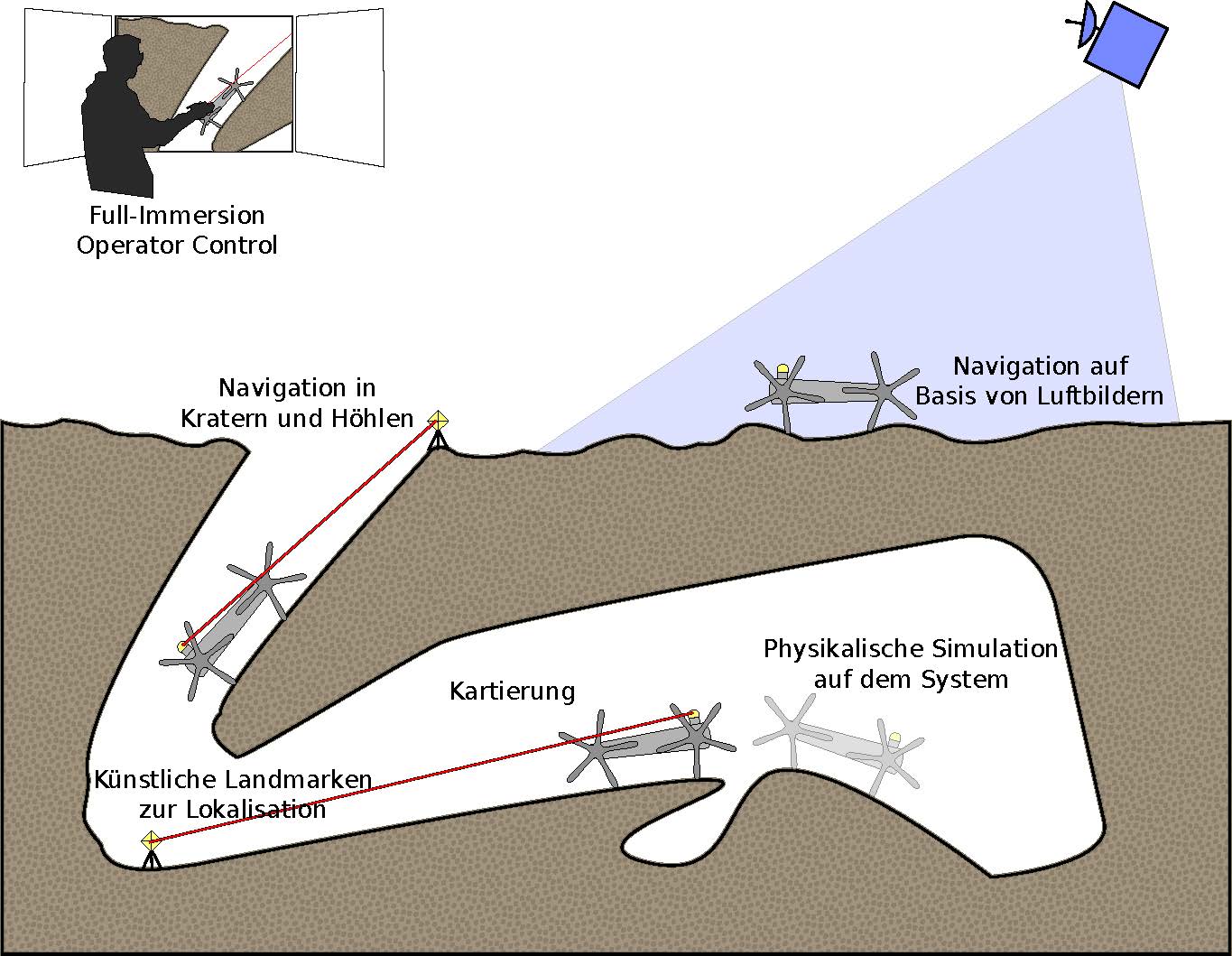 Entern - Environment Modelling and Navigation for Robotic Space-ExplorationSchwendner, Jakob, Hidalgo-Carrió, Javier, Dominguez, Raul, Planthaber, Steffen, Yoo, Yong-Ho, Asadi, Behnam, Machowinski, Janosch, Rauch, Christian, and Kirchner, FrankIn Advanced Space Technologies for Robotics and Automation 2015
Entern - Environment Modelling and Navigation for Robotic Space-ExplorationSchwendner, Jakob, Hidalgo-Carrió, Javier, Dominguez, Raul, Planthaber, Steffen, Yoo, Yong-Ho, Asadi, Behnam, Machowinski, Janosch, Rauch, Christian, and Kirchner, FrankIn Advanced Space Technologies for Robotics and Automation 2015Lunar and planetary craters and caves are of special scientific interest and have the potential to provide shelter for human habitats. Robots could provide the means to explore these difficult environments. A number of challenges are involved with the exploration: The robots have to be highly mobile to negotiate the difficult terrain, and need to perform most of their task autonomously, especially in caves lacking radio communication. This paper gives an overview of the Entern project and the associated goals and challenges. This includes the research of technologies for operations, environment representation and navigation. Special emphasis is put into the development of on-board simulation, to improve the reliability and the operational envelope of the robots. Further, a description of evaluation scenarios in relevant earth analogue environments is provided.
@inproceedings{Schwendner2015astra, address = {Noordwijk}, author = {Schwendner, Jakob and Hidalgo-Carri{\'{o}}, Javier and Dominguez, Raul and Planthaber, Steffen and Yoo, Yong-Ho and Asadi, Behnam and Machowinski, Janosch and Rauch, Christian and Kirchner, Frank}, booktitle = {Advanced Space Technologies for Robotics and Automation}, keywords = {Caves,Exploration,Lava Tubes,Mars.,Moon,Robots}, pages = {1 -- 8}, title = {{Entern - Environment Modelling and Navigation for Robotic Space-Exploration}}, thumbnail = {imgs/schwendner2015astra.jpg}, web = {https://robotik.dfki-bremen.de/en/research/projects/entern/}, pdf = {http://robotics.estec.esa.int/ASTRA/Astra2015/Papers/Session%208B/97428_Schwendner.pdf}, bibtex_show = {true}, year = {2015} }
2014
-
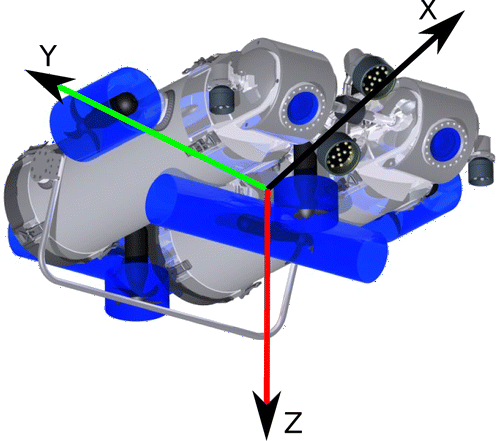 A Validation Process for Underwater Localization AlgorithmsHildebrandt, Marc, Gaudig, Christopher, Christensen, Leif, Natarajan, Sankaranarayanan, Hidalgo-Carrió, Javier, Paranhos, Patrick Merz, and Kirchner, FrankInternational Journal of Advanced Robotic Systems 2014
A Validation Process for Underwater Localization AlgorithmsHildebrandt, Marc, Gaudig, Christopher, Christensen, Leif, Natarajan, Sankaranarayanan, Hidalgo-Carrió, Javier, Paranhos, Patrick Merz, and Kirchner, FrankInternational Journal of Advanced Robotic Systems 2014This paper describes the validation process of a localization algorithm for underwater vehicles. In order to develop new localization algorithms, it is essential to characterize them with regard to their accuracy, long-term stability and robustness to external sources of noise. This is only possible if a gold-standard reference localization (GSRL) is available against which any new localization algorithm (NLA) can be tested. This process requires a vehicle which carries all the required sensor and processing systems for both the GSRL and the NLA. This paper will show the necessity of such a validation process, briefly sketch the test vehicle and its capabilities, describe the challenges in computing the localizations of both the GSRL and the NLA simultaneously for comparison, and conclude with experimental data of real-world trials.
@article{Hildebrandt2014ijars, author = {Hildebrandt, Marc and Gaudig, Christopher and Christensen, Leif and Natarajan, Sankaranarayanan and Hidalgo-Carri{\'{o}}, Javier and Paranhos, Patrick Merz and Kirchner, Frank}, doi = {10.5772/58581}, file = {:home/javi/mendeley/pdf/Hildebrandt et al. - 2014 - A Validation Process for Underwater Localization Algorithms.pdf:pdf}, issn = {1729-8806}, journal = {International Journal of Advanced Robotic Systems}, language = {en}, mendeley-groups = {localization/mapping}, month = sep, pages = {1 -- 8}, publisher = {InTech}, title = {{A Validation Process for Underwater Localization Algorithms}}, volume = {11}, thumbnail = {imgs/hildebrandt2014ijars.png}, web = {https://journals.sagepub.com/doi/full/10.5772/58581}, bibtex_show = {true}, year = {2014} } -
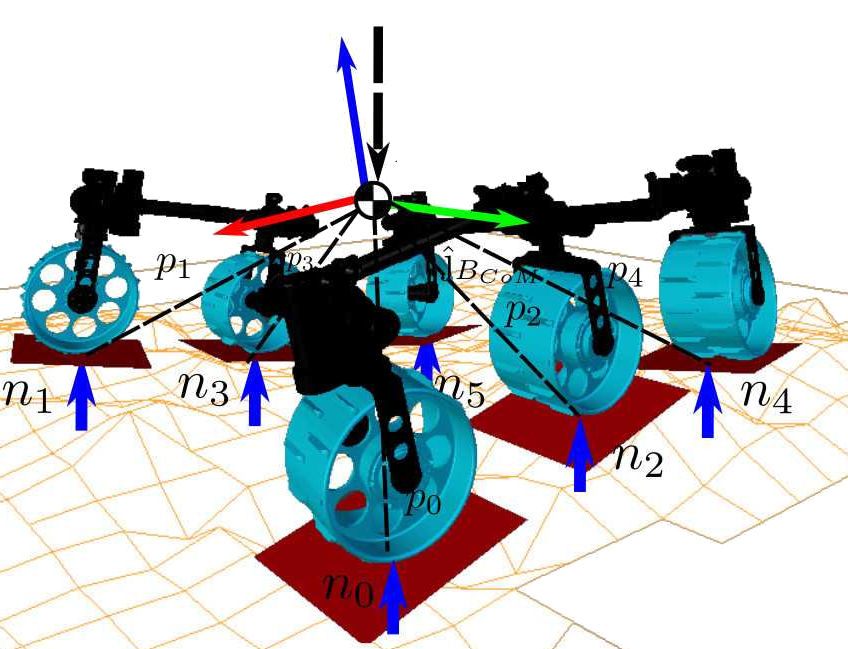 Static forces weighted Jacobian motion models for improved OdometryHidalgo-Carrió, Javier, Babu, Ajish, and Kirchner, FrankIn 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2014
Static forces weighted Jacobian motion models for improved OdometryHidalgo-Carrió, Javier, Babu, Ajish, and Kirchner, FrankIn 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2014The estimation of robot’s motion at thepredictionstep of any localization framework is commonly performedusing a motion model in conjunction with inertial measure-ments. In the context of field robotics, articulated mobile robotshave complex chassis. They might require a complete model incomparison with the traditionally used planar assumption. Inthis paper, we use a Jacobian motion model-based approachfor real-time inertial-added odometry. The work makes useof the transformation approach [1] to accurately model 6-DoF kinematics. The algorithm relates normal forces with theprobability of a contact-point to slip. The result increases theaccuracy by weighting the least-squares solution using staticforces prediction. The method is applied to the Asguard v3system, a simple but highly capable leg-wheel hybrid robot.The performance of the approach is demonstrated in extensivefield testing within different unstructured environments. In-depth error analysis and comparison with planar odometryis discussed, resulting in a superior localization.
@inproceedings{Hidalgo2014iros, author = {Hidalgo-Carri{\'{o}}, Javier and Babu, Ajish and Kirchner, Frank}, booktitle = {2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, doi = {10.1109/IROS.2014.6942557}, isbn = {978-1-4799-6934-0}, keywords = {Asguard v3 system,Jacobian matrices,Kinematics,Mathematical model,Mobile robots,Robot kinematics,Vectors,Wheels,articulated mobile robots,field robotics,leg-wheel hybrid robot,localization framework,mobile robots,motion control,real-time inertial-aided odometry,real-time systems,robot motion,static forces weighted Jacobian motion models}, language = {English}, month = sep, pages = {169--175}, publisher = {IEEE}, title = {{Static forces weighted Jacobian motion models for improved Odometry}}, thumbnail = {imgs/hidalgo2014iros.png}, pdf = {https://www.dfki.de/fileadmin/user_upload/import/7414_140702_Static_forces_weighted_Jacobian_motion_models_for_improved_Odometry_IROS_Hidalgo_preprint.pdf}, bibtex_show = {true}, year = {2014} }
2013
-
 Navigation and Slip Kinematics for High Performance Motion ModelsHidalgo-Carrió, JavierIn Symposium on Advanced Space Technologies in Robotics and Automation 2013
Navigation and Slip Kinematics for High Performance Motion ModelsHidalgo-Carrió, JavierIn Symposium on Advanced Space Technologies in Robotics and Automation 2013When absolute positioning systems are not available, kinematics modeling and rover chassis analyses play a dominant role in rover localization. It is the goal of this manuscript to describe and analyze a complete kinematic model which captures the six DoF pose (position and orientation) while traversing uneven terrains for hybrid systems and independently actuated wheels. The model is analyzed in order to correctly propagate rover pose as input for a pose estimator in localization towards efficient dead reckoning processes. Testing results are discussed for Asguard, a leg-wheel scout rover with a simple actuation system with enhanced maneuver capabilities.
@inproceedings{Hidalgo2013astra, author = {Hidalgo-Carri{\'{o}}, Javier}, booktitle = {Symposium on Advanced Space Technologies in Robotics and Automation}, keywords = {dead reckoning and planetary rovers,robot motion,rover kinematics,wheel odometry}, title = {{Navigation and Slip Kinematics for High Performance Motion Models}}, thumbnail = {imgs/hidalgo2013astra.png}, pdf = {https://www.dfki.de/fileadmin/user_upload/import/6829_130603_Navigation_and_Slip_Kinematics_for_High_Performance__Motion_Models_ASTRA_Hidalgo.pdf}, bibtex_show = {true}, year = {2013} }
2012
-
 Improving Planetary Rover Attitude Estimation via MEMS Sensor CharacterizationHidalgo-Carrió, Javier, Poulakis, Pantelis, Köhler, Johan, Del-Cerro, Jaime, and Barrientos, AntonioSensors 2012
Improving Planetary Rover Attitude Estimation via MEMS Sensor CharacterizationHidalgo-Carrió, Javier, Poulakis, Pantelis, Köhler, Johan, Del-Cerro, Jaime, and Barrientos, AntonioSensors 2012Micro Electro-Mechanical Systems (MEMS) are currently being considered in the space sector due to its suitable level of performance for spacecrafts in terms of mechanical robustness with low power consumption, small mass and size, and significant advantage in system design and accommodation. However, there is still a lack of understanding regarding the performance and testing of these new sensors, especially in planetary robotics. This paper presents what is missing in the field: a complete methodology regarding the characterization and modeling of MEMS sensors with direct application. A reproducible and complete approach including all the intermediate steps, tools and laboratory equipment is described. The process of sensor error characterization and modeling through to the final integration in the sensor fusion scheme is explained with detail. Although the concept of fusion is relatively easy to comprehend, carefully characterizing and filtering sensor information is not an easy task and is essential for good performance. The strength of the approach has been verified with representative tests of novel high-grade MEMS inertia sensors and exemplary planetary rover platforms with promising results.
@article{Hidalgo2012sensors, author = {Hidalgo-Carri{\'{o}}, Javier and Poulakis, Pantelis and K{\"{o}}hler, Johan and Del-Cerro, Jaime and Barrientos, Antonio}, doi = {10.3390/s120202219}, journal = {Sensors}, keywords = {attitude estimation,inertial measurement unit (IMU),inertial navigation system (INS),micro-electro-mechanical systems (MEMS),planetary rover,sensor characterization,sensor fusion}, language = {en}, month = feb, number = {2}, pages = {2219--2235}, publisher = {Molecular Diversity Preservation International}, title = {{Improving Planetary Rover Attitude Estimation via MEMS Sensor Characterization}}, volume = {12}, thumbnail = {imgs/hidalgo2012sensors.jpg}, web = {https://www.mdpi.com/1424-8220/12/2/2219}, pdf = {https://www.mdpi.com/1424-8220/12/2/2219}, bibtex_show = {true}, year = {2012} } -
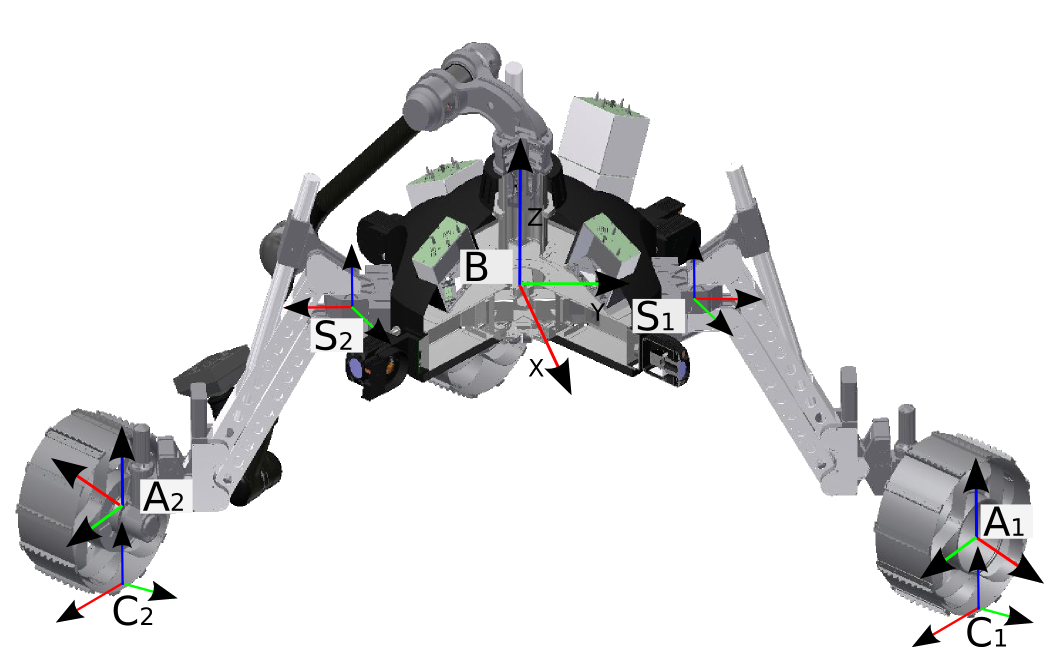 Kinematics Modeling of a Hybrid Wheeled-Leg Planetary RoverHidalgo-Carrió, Javier, and Cordes, FlorianIn International Symposium on Artificial Intelligence, Robotics and Automation in Space 2012
Kinematics Modeling of a Hybrid Wheeled-Leg Planetary RoverHidalgo-Carrió, Javier, and Cordes, FlorianIn International Symposium on Artificial Intelligence, Robotics and Automation in Space 2012It is the goal of this manuscript to describe and analyze acomplete kinematic model for hybrid wheeled-leg roversand its applicability to Sherpa, a flexible rover with acomplex actuation system. Differential kinematic equa-tions of the hybrid legs are combined to form the com-posite equation for the rover motion. The model capturesthe 6 DoF pose (position and orientation) while travers-ing uneven terrains for hybrid systems and independentlyactuated joints. The kinematics model is analyzed in or-der to correctly propagate rover pose as input for a poseestimator in localization. Initial results from simulationare discussed for Sherpa navigation kinematics towardsefficient pose estimation and dead reckoning
@inproceedings{Hidalgo2012isairas, author = {Hidalgo-Carri{\'{o}}, Javier and Cordes, Florian}, booktitle = {International Symposium on Artificial Intelligence, Robotics and Automation in Space}, keywords = {dead reckoning and planetary,dimensional space,e,either on planar two-,i,kinematics,on kinematics have concentrated,plane and,robot motion,rover,rovers,translation in the x-y,wheel odometry}, title = {{Kinematics Modeling of a Hybrid Wheeled-Leg Planetary Rover}}, thumbnail = {imgs/hidalgo2012isairas.png}, pdf = {https://www.dfki.de/fileadmin/user_upload/import/6453_121004_Kinematics_Modeling_of_a_Hybrid_Wheeled-Leg_Planetary_Rover_iSAIRAS_Hidalgo.pdf}, bibtex_show = {true}, year = {2012} } -
 Planetary Rover Localization Design: Antecedents and Directions.Hidalgo-Carrió, Javier, Schwendner, Jakob, and Kirchner, FrankIn IEEE Intelligent Vehicles Symposium Workshops 2012
Planetary Rover Localization Design: Antecedents and Directions.Hidalgo-Carrió, Javier, Schwendner, Jakob, and Kirchner, FrankIn IEEE Intelligent Vehicles Symposium Workshops 2012This paper describes the localization problem in planetary rovers and its influence in the mission success. This manuscript gives an overview of the localization subsystem from a system level perspective and its impact on mission operations. It discusses current problems on the design of proper sensor fusion scheme and addresses future challenges which needs to be pursued in order to move forward planetary rovers into more intelligent vehicles for future planetary missions.
@inproceedings{Hidalgo2012ivsw, author = {Hidalgo-Carri{\'{o}}, Javier and Schwendner, Jakob and Kirchner, Frank}, booktitle = {IEEE Intelligent Vehicles Symposium Workshops}, pages = {1--8}, title = {{Planetary Rover Localization Design: Antecedents and Directions.}}, pdf = {https://www.dfki.de/fileadmin/user_upload/import/6335_120620_Planetary_Rover_Localization_Design-_Antecedents_and_Directions_IV_Hidalgo.pdf}, thumbnail = {imgs/hidalgo2012ivsw_.png}, bibtex_show = {true}, year = {2012} } -
 Terrain aided navigation for planetary exploration missionsSchwendner, Jakob, and Hidalgo-Carrió, JavierIn International Symposium on Artificial Intelligence, Robotics and Automation in Space 2012
Terrain aided navigation for planetary exploration missionsSchwendner, Jakob, and Hidalgo-Carrió, JavierIn International Symposium on Artificial Intelligence, Robotics and Automation in Space 2012A central part of current space activities is to learn moreabout our solar system, its origins, its resources and itsconditions for harbouring life. A key technology for per-forming surface exploration of celestial bodies are mo-bile robotic systems, as they are able to withstand theharsh conditions with reasonable effort. One importantrequirement for performing navigation of a mobile robotis the ability to localise the system within a known ref-erence. Visual methods, which have proven useful inthis context, can add constraints on processing powerand environmental conditions. In this paper an alterna-tive approach is presented which only uses inertial sen-sors and encoders in order localise within a known map.The method is evaluated in a simulated lunar environmentbased on LRO digital elevation maps. The results showan average localisation error of 11 m for a travelled dis-tance of 2.3 km, assuming low-precision MEMS gyros.The proposed method can be applied to perform resourceefficient localisation in situations where visual methodsfail or are too costly to perform.
@inproceedings{Schwendner2012isairas, author = {Schwendner, Jakob and Hidalgo-Carri{\'{o}}, Javier}, booktitle = {International Symposium on Artificial Intelligence, Robotics and Automation in Space}, keywords = {although,calisation,exploration,gps,isation with respect to,lo-,lro dem,of local-,terrain aided navigation,the earth fixed frame,tioning system,which provides a means}, pages = {1 -- 8}, title = {{Terrain aided navigation for planetary exploration missions}}, thumbnail = {imgs/schwendner2012isairas.png}, web = {http://robotics.estec.esa.int/i-SAIRAS/}, pdf = {http://robotics.estec.esa.int/i-SAIRAS/isairas2012/Papers/Session%203A/03A_03_schwendner.pdf}, bibtex_show = {true}, year = {2012} }
2011
-
 A Miniaturised Space Qualified MEMS IMU for Rover Navigation Requirements and Testing of a Proof of Concept Hardware DemonstratorRehrmann, Felix, Schwendner, Jakob, Cornforth, John, Durrant, Dick, Lindegren, Robert, Selin, Per, Hidalgo-Carrió, Javier, Poulakis, Pantelis, and Köhler, JohanIn Advanced Space Technologies for Robotics and Automation 2011
A Miniaturised Space Qualified MEMS IMU for Rover Navigation Requirements and Testing of a Proof of Concept Hardware DemonstratorRehrmann, Felix, Schwendner, Jakob, Cornforth, John, Durrant, Dick, Lindegren, Robert, Selin, Per, Hidalgo-Carrió, Javier, Poulakis, Pantelis, and Köhler, JohanIn Advanced Space Technologies for Robotics and Automation 2011Mobile robotic systems will without a doubt become even more relevant for space exploration missionsthan they currently are. High cost for manned programs and recent success of robotic mission (e.g.MER) are likely to form a shift towards robotic missions. One of the key aspects of exploration systemsis mobility. Apart from the physical capabilities to negotiate complex and difficult terrain, the aspect ofnavigation is also of great importance. Global Positioning Systems like the GPS are not availableoutside of earthbound activities. The previous successful approaches for mobile robot navigation in space are vision based. A great number of positive sides like environmental awareness and exploitationof the images for science are on the up-side of this. There are however some design constraints in orderto make the use feasible. Image processing does require a certain amount of processing resources and a favorable positioning of the cameras. One possible alternative could be the use of Terrain AidedNavigation methods for vision free localization in known environments. By using a-priori informationabout the environment (e.g. from orbiter sensor or other sources) the information on the orientation andthe position of the environment contact points can be used to estimate the position of the robot withinthe map [1]. The feasibility of the this approach is demonstrated using Digital Elevation Maps from theLRO LOLA Instrument and a simulated mobile robot based on the Asguard [2] system. We employ aBayesian filtering method to estimate the position of the robot within the map, and compare it to theposition from the odometry. We also investigate the effect of the resolution of the a-priori map on thefinal localization error. While the proposed method should not be seen as a complete replacement ofvisual navigation, it can augment such systems. It can also provide a localization solution with abounded error for missions where visual processing is not feasible due to resource or engineeringconstraints.
@inproceedings{Rehrmann2011astra, author = {Rehrmann, Felix and Schwendner, Jakob and Cornforth, John and Durrant, Dick and Lindegren, Robert and Selin, Per and Hidalgo-Carri{\'{o}}, Javier and Poulakis, Pantelis and K{\"{o}}hler, Johan}, booktitle = {Advanced Space Technologies for Robotics and Automation}, mendeley-groups = {localization/mapping}, number = {1}, pages = {1 -- 8}, title = {{A Miniaturised Space Qualified MEMS IMU for Rover Navigation Requirements and Testing of a Proof of Concept Hardware Demonstrator}}, thumbnail = {imgs/rehrmann2011astra.png}, pdf = {http://robotics.estec.esa.int/ASTRA/Astra2011/Papers/07B/FCXNL-11A06-2138580-1-2138580rehrmann.pdf}, bibtex_show = {true}, year = {2011} } -
 ESTEC Testbed Capabilities for the Performance Characterization of Planetary Rover Localization Sensors - First Results on IMU InvestigationsHidalgo-Carrió, Javier, Poulakis, Pantelis, Barrientos, Antonio, and Del-cerro, JaimeIn ASTRA 2011 - 11th ESA Workshop on Advanced Space Technologies for Robotics and Automation 2011
ESTEC Testbed Capabilities for the Performance Characterization of Planetary Rover Localization Sensors - First Results on IMU InvestigationsHidalgo-Carrió, Javier, Poulakis, Pantelis, Barrientos, Antonio, and Del-cerro, JaimeIn ASTRA 2011 - 11th ESA Workshop on Advanced Space Technologies for Robotics and Automation 2011During the last year internal research activities have been carried out at ESTEC in the line of testing high- grade inertial sensors. This article shows the performance characterization of prototype Inertial Measurement Units (IMUs) in terms of facilities and methodologies within ESTEC, with focus on MEMS inertial sensors for planetary rovers. Specifically, this article shows the system level demonstration and capabilities of the test facilities of the ESTEC Automation & Robotics section as well as first performance results of MEMS inertial sensors for attitude estimation on typical planetary rover manoeuvres.
@inproceedings{Hidalgo2011astra, author = {Hidalgo-Carri{\'{o}}, Javier and Poulakis, Pantelis and Barrientos, Antonio and Del-cerro, Jaime}, booktitle = {ASTRA 2011 - 11th ESA Workshop on Advanced Space Technologies for Robotics and Automation}, pages = {1--8}, publisher = {ESA/ESTEC}, title = {{ESTEC Testbed Capabilities for the Performance Characterization of Planetary Rover Localization Sensors - First Results on IMU Investigations}}, pdf = {http://robotics.estec.esa.int/ASTRA/Astra2011/Papers/02B/FCXNL-11A06-2144706-1-2144706hidalgo.pdf}, thumbnail = {imgs/hidalgo2011astra.png}, bibtex_show = {true}, year = {2011} } -
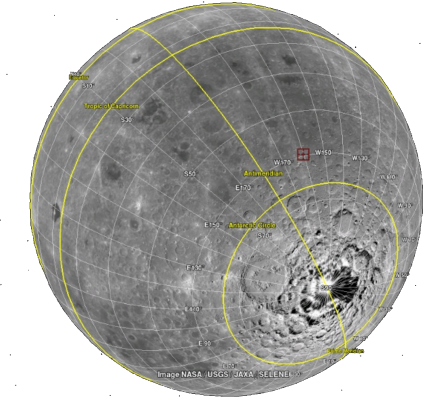
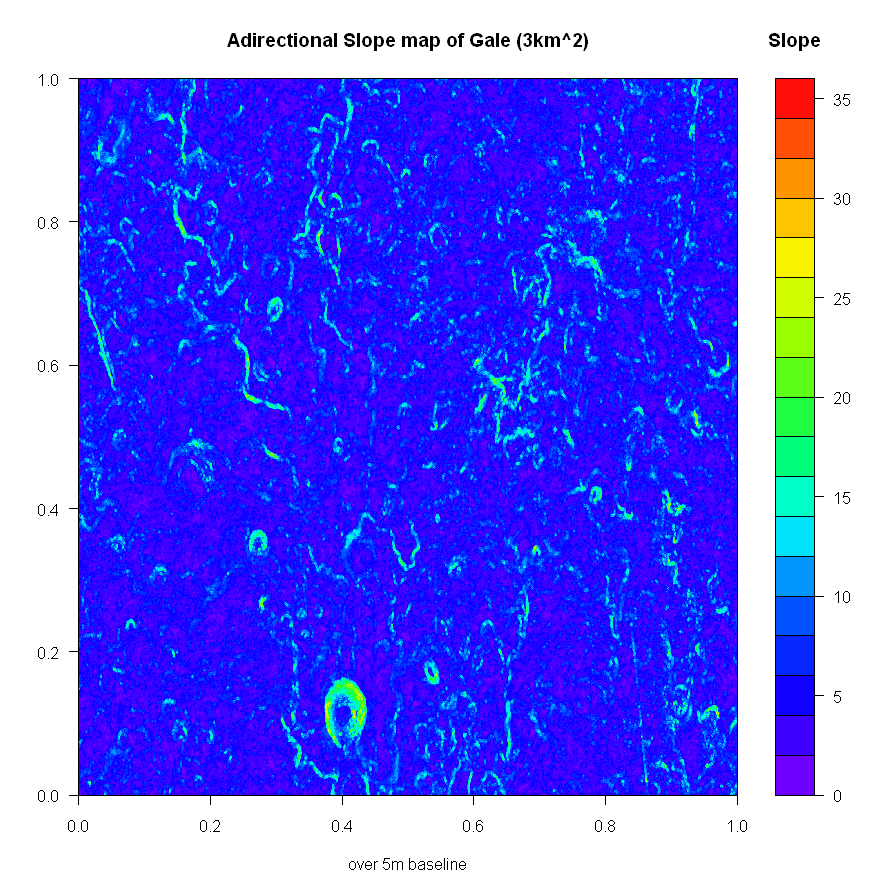 Planetary Terrain Analysis for Robotic MissionsMasarotto, V, Joudrier, L, Hidalgo-Carrió, Javier, and Lorenzoni, LIn Advanced Space Technologies for Robotics and Automation 2011
Planetary Terrain Analysis for Robotic MissionsMasarotto, V, Joudrier, L, Hidalgo-Carrió, Javier, and Lorenzoni, LIn Advanced Space Technologies for Robotics and Automation 2011From the early studies to the actual design of a plane-tary rover mission, the knowledge of the type of terrainthat will be encountered is crucial. Usually, a referenceterrain is defined to help the design of the rover subsys-tems, knowing that the terrain will be different during theactual mission. Furthermore, once the landing site is se-lected, the evaluation of the slopes is essential to measurethe performance of an Entry, Descent and Landing Sys-tem.The main goal of this paper is exposing the method usedto measure the slopes distribution of a terrain from itsDigital Elevation Maps and, through this, explain the re-quirements set for the reference terrain for Mars mission.At the end, there are presented methods to generate sam-ple terrains to be used for rover design and navigationverification.
@inproceedings{Masarotto2011astra, author = {Masarotto, V and Joudrier, L and Hidalgo-Carri{\'{o}}, Javier and Lorenzoni, L}, booktitle = {Advanced Space Technologies for Robotics and Automation}, title = {{Planetary Terrain Analysis for Robotic Missions}}, thumbnail = {imgs/masarotto2011astra.png}, pdf = {https://www.cosmos.esa.int/documents/291575/1297473/Masarottoetal_adirectional_slope_paper.pdf/7fb23027-d0af-3737-a37d-4ed5a72cffbf}, bibtex_show = {true}, year = {2011} }